Morphology, not just wrapping success, controls shell thickness, trapped air, crown formation, encapsulated volume, layer sequence, and future function.
AI-guided inverse morphology design for liquid-liquid encapsulation.
INTERACT-Morph turns high-speed videos, physics-readable observables, and uncertainty-aware models into a lab-facing design-decision tool for impact-driven liquid-shell morphology.
Fuse material descriptors, high-speed interface trajectories, calibrated uncertainty, and constrained Bayesian optimization into an inverse design layer.
A documented software tool that recommends operating conditions with uncertainty, nearby prior evidence, constraints, and failure-mode warnings.
Why it matters
The actionable material state is morphology.
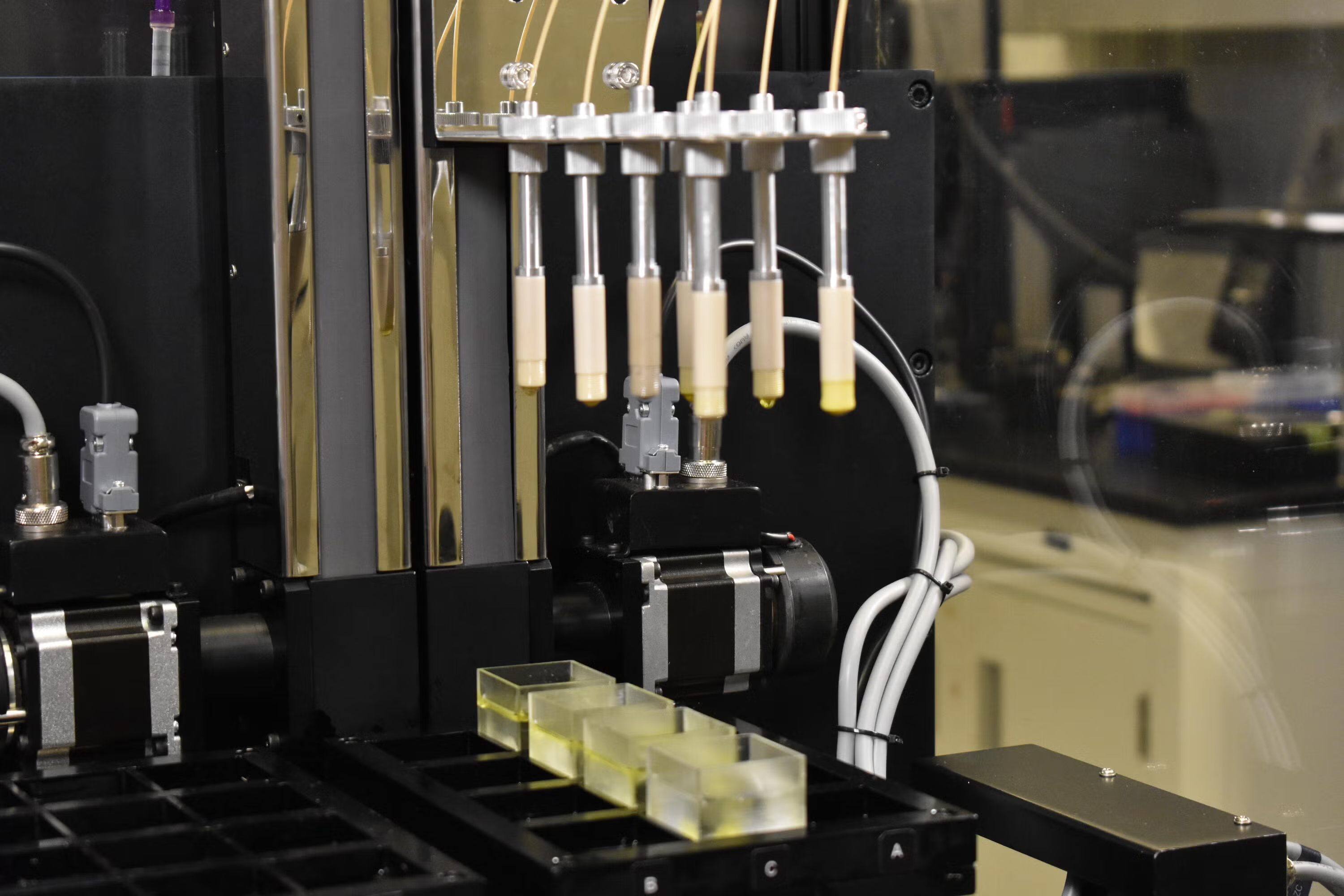
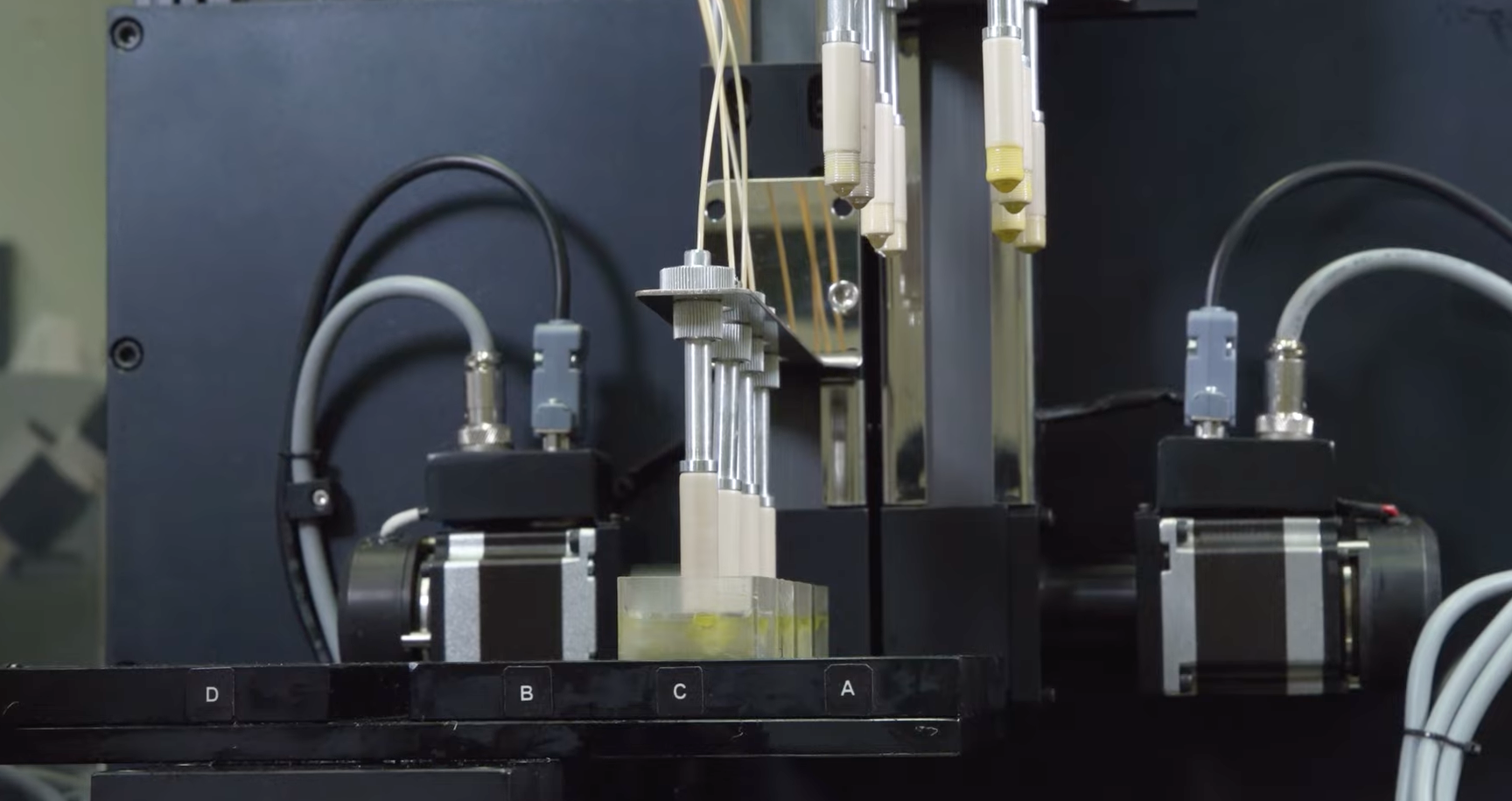
Liquid-liquid encapsulation can wrap a liquid cargo inside an immiscible liquid shell in milliseconds. The opportunity is broader than making a wrapped droplet: shell morphology controls protection, diffusion length, buoyancy, stability, layer contact order, and downstream release or reaction.
The design challenge is inverse. Experimentalists need to know which impact height, shell volume, confinement geometry, or multilayer route will produce a target shell thickness, nonuniformity, trapped-air fraction, crown index, encapsulated volume, or layer sequence.
Computational stack
Four layers from transient interfaces to target morphology.
Dataset foundation
Existing and new high-speed videos, post-encapsulation images, fluid properties, impact heights, shell volumes, loop geometries, and annotation status are frozen into reproducible snapshots.
Video state inference
Domain-adapted segmentation tracks the core, host interface, shell lens, air cavity, loop boundary, and final cargo, producing physically meaningful time-series observables.
Morphology prediction
A multitask forward model predicts wrapping mode, penetration versus trapping, loop failure, shell thickness, crown index, trapped air, encapsulated volume, core offset, and layer sequence.
Inverse design
A constrained optimization layer recommends candidate experiments for a requested morphology while exposing uncertainty, constraint violations, nearest prior experiments, and extrapolation warnings.
Experimental scope
Focused scope buckets.
Conventional encapsulation
Impact-driven wrapping, penetration/trapping boundaries, low-air operating windows, shell thickness, crown formation, and encapsulated volume across material and process descriptors.
Loop-assisted confinement
Circular-loop confinement and finite shell-volume windows, including minimum usable volume, overflow limits, crown suppression, and constrained interfacial-layer behavior.
Limited multilayer route decisions
Selected direct-impact versus Y-junction-assisted multilayer cases where layer ordering, density, and interfacial-tension constraints determine feasible morphology.
Success criteria
Validation gates tied to prospective experimental usefulness.
Workplan
The route to a validated morphology planner.
Freeze the data foundation, dataset schema, dataset card, initial segmentation/tracking, and thermodynamic/regime-map baselines.
Run targeted conventional and loop-assisted experiments across impact height, shell volume, penetration/trapping boundaries, low-air regions, and loop windows.
Train the first observable-aware multitask model and compare against held-out operating windows and baseline predictors.
Refine morphology regression, uncertainty calibration, out-of-domain checks, and selective fluorescence or microscopy calibration.
Build the inverse recommendation engine, add the limited multilayer decision layer, and start prospective target-morphology campaigns.
Complete prospective validation, software release, benchmark workflows, model card, dataset card, and failure-mode map.
Team
Computational AI-for-science meets experimental interfacial matter.
INTERACT-Morph pairs Dr. Sirshendu Misra's impact-driven liquid-liquid encapsulation platform with Dr. Kevin Dsouza's AI-for-science, uncertainty-aware modeling, and research software background.
Dr. Sirshendu Misra
Primary applicant; experimental interfacial platform lead
Dr. Misra is a Ramanujan Fellow Faculty member at the Indian Institute of Science, Bengaluru. His prior work anchors the experimental platform: impact-driven wrapping, penetration and trapping, four-fluid interface dynamics, constrained interfacial layers, and multilayer encapsulation.

Dr. Kevin Dsouza
Equal co-applicant; AI, software, and model evaluation lead
Dr. Kevin Dsouza is an NSERC Postdoctoral Fellow at the Indian Institute of Science, Bengaluru. He leads the computational stack: video processing, physics-aware representation learning, uncertainty calibration, inverse recommendation, reproducible evaluation, and experimentalist-facing software workflows.
Waterloo foundation
From simple liquid-liquid wrapping to scalable encapsulation.
Research origin
Our team's research at the University of Waterloo highlighted the original liquid-liquid wrapping work as a faster, lower-cost route for coating liquid medication. The method uses gravity and interfacial forces to wrap falling droplets in a liquid shell that can later cure and protect the core cargo.
Read the Waterloo News storyCommercialization path
Waterloo's commercialization office later described the platform as a simple, low-cost liquid-liquid encapsulation system with applications across pharmaceuticals, nutraceuticals, food and beverage, cosmetics, and personal care. That translation path motivates INTERACT-Morph's focus on reliable morphology planning for real experimental use.
Read the WatCo commercialization storySelected papers
Project-relevant foundation and team track record.
Impact Driven Liquid Encapsulation: Promises, Development, and Future Prospects
Misra, Mitra · Advanced Materials Interfaces · 2025
Encapsulation with an interfacial liquid layer: Robust and efficient liquid-liquid wrapping
Misra, Trinavee, Gunda, Mitra · Journal of Colloid and Interface Science · 2020
Liquid-liquid encapsulation: Penetration vs. trapping at a liquid interfacial layer
Misra, Banerjee, Mitra · ACS Applied Materials & Interfaces · 2023
Interface dynamics at a four-fluid interface during droplet impact on a two-fluid system
Chowdhury, Misra, Mitra · Langmuir · 2024
Liquid-liquid encapsulation with a constrained interfacial layer
Misra, Chowdhury, Mitra · Journal of Colloid and Interface Science · 2025
A versatile multilayer liquid-liquid encapsulation technique
Banerjee, Misra, Mitra · Journal of Colloid and Interface Science · 2025
Learning representations of chromatin contacts using a recurrent neural network identifies genomic drivers of conformation
Dsouza et al. · Nature Communications · 2022
Latent representation of the human pan-celltype epigenome through a deep recurrent neural network
Dsouza, Li, Bhargava, Libbrecht · IEEE/ACM TCBB · 2021
BoreaRL: A Multi-Objective Reinforcement Learning Environment for Climate-Adaptive Boreal Forest Management
Dsouza et al. · arXiv · 2025
Structuring Collective Action with LLM-Guided Evolution
Dsouza et al. · arXiv · 2025
A downscaled faster-RCNN framework for signal detection and time-frequency localization in wideband RF systems
Prasad, Dsouza, Bhargava · IEEE Transactions on Wireless Communications, · 2020